Data structure
Task Control Block: TCB
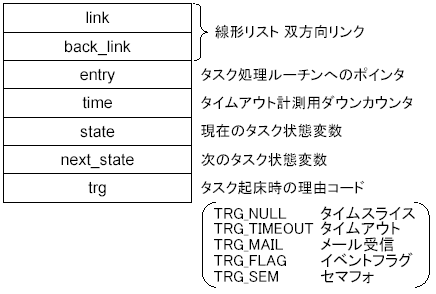
struct st_tcb {
struct st_tcb *link;
struct st_tcb *back_link;
void (*entry)( byte state );
uint16 time;
uint8 state;
uint8 next_state;
uint8 trg;
};
typedef struct st_tcb tcb_type;Que of waiting for run: ReadyQ
起床されたタスクの実行待ちリスト。繋がれたTCBを順に実行する。
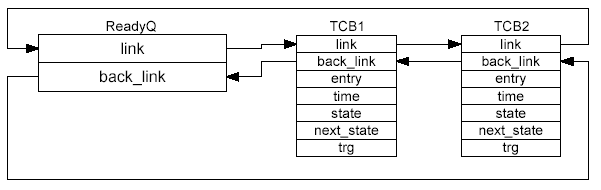
struct st_que {
struct st_tcb *link;
struct st_tcb *back_link;
};
typedef struct st_que que_type;
que_type ReadyQ;Que of waiting for timeout:TimerQ
タイムアウト待ちタスクのリスト。基準タイマ割込みで繋がれた最初のTCBのtimeを減算する。time=0ならばタイムアウト待ちキューからTCBを削除し、実行待ちキューにTCBを追加する。
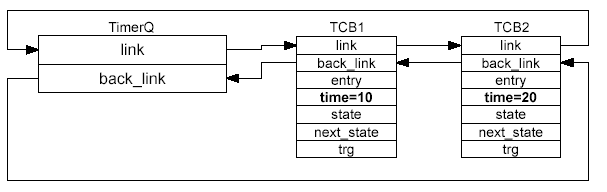
struct st_que {
struct st_tcb *link;
struct st_tcb *back_link;
};
typedef struct st_que que_type;
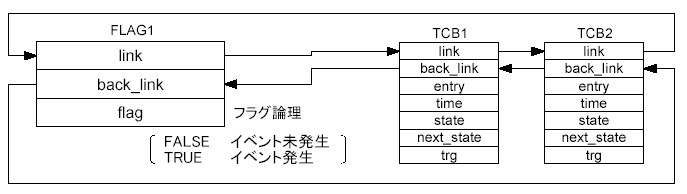
que_type TimerQ;Event flag: FLAG
Semaphore: SEM
セマフォsignal動作待ちタスクのリスト。セマフォにより排他制御を行う。size=1とすればバイナリセマフォとなる。
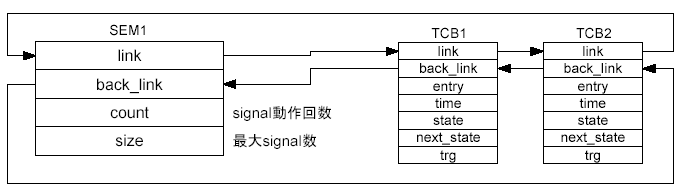
struct st_sem {
struct st_tcb *link;
struct st_tcb *back_link;
uint8 count;
uint8 size;
};
typedef struct st_sem sem_type;Mail box: MBX
メッセージ単位でタスク間の同期をとる。バッファはユーザ側で用意する。
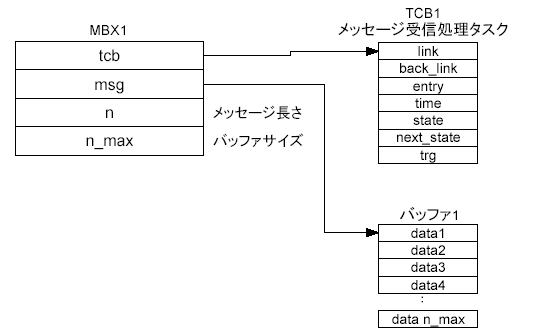
struct st_mbx {
tcb_type *tcb;
uint8 *msg;
uint8 n;
uint8 n_max;
};
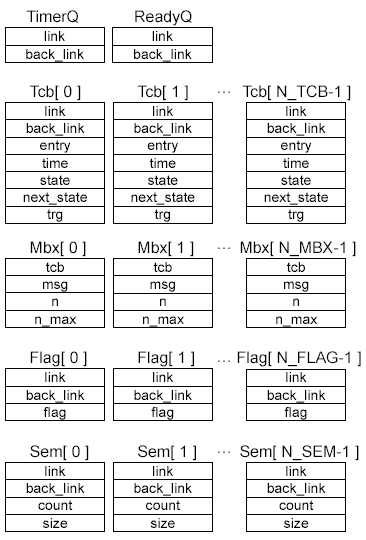
typedef struct st_mbx mbx_type;OS work area
OSのワークエリアはアプリケーションで使用するタスク数、メールボックス数、イベントフラグ数、セマフォ数を定義して予め領域を確保する。
/* ユーザー定義 ここから */
#define N_TCB 10 /* TCBの最大同時定義数 [12byte/tcb] */
#define N_MBX 10 /* メールボックスの定義数 [6byte/mbx] */
#define N_FLAG 10 /* イベントフラグの定義数 [6byte/flag] */
#define N_SEM 10 /* セマフォの定義数 [6byte/sem] */
/* ユーザー定義 ここまで */
/* 実行制御用Queue */
static volatile que_type TimerQ; /* タイムアウト待ちQueue */
static volatile que_type ReadyQ; /* 実行待ちQueue */
/* TCB */
static volatile tcb_type Tcb[ N_TCB ]; /* TaskControlBlock */
/* メールボックス */
static volatile mbx_type Mbx[ N_MBX ];
/* イベントフラグ */
static volatile flag_type Flag[ N_FLAG ];
/* セマフォ */
static volatile sem_type Sem[ N_SEM ];